次世代高次機能デバイス開発部門
情報処理・制御デバイス分野の研究開発

ナノグラニュラー磁性薄膜等の機能性材料を用いた研究開発
本分野では、本法人で開発されたナノグラニュラー磁性薄膜等の機能性材料を用いて高性能かつ超小型の各種センサ素子や、それらを活用した電子・情報系応用システムの研究開発を行っております。また、外部の学術機関や民間企業との共同研究や試作開発研究を通して、研究成果の実用化を推進しております。
多次元磁気情報センシング技術の研究開発
現代の高度情報化社会では、より安全・安心な社会基盤を構築するために、あらゆる人工物、例えば自動車、航空機などに搭載されている電子部品や精密機器、或いは土木・建築構造物等の内部の動作状態を高度に診断、解析、評価する技術が求められております。本分野では、被検体内部から発生する磁気エネルギーを可視化して、非破壊で、簡便に内部の動作異常を検出するための検査システムを開発しております。
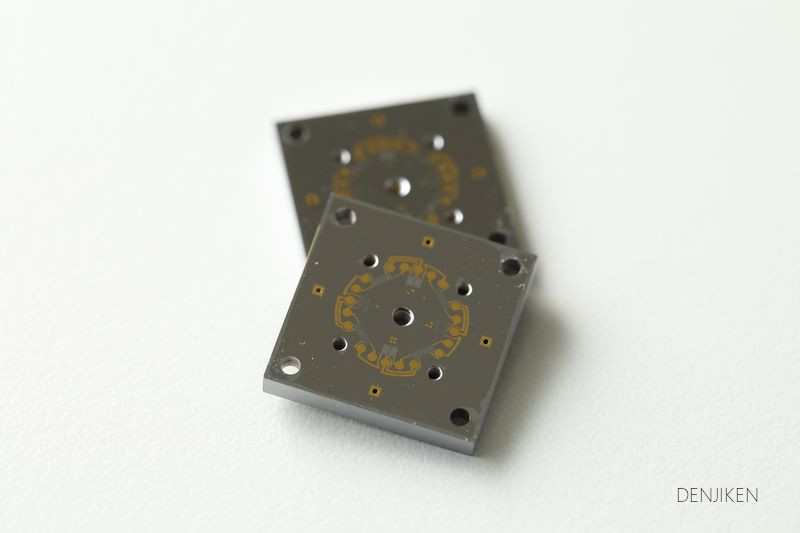
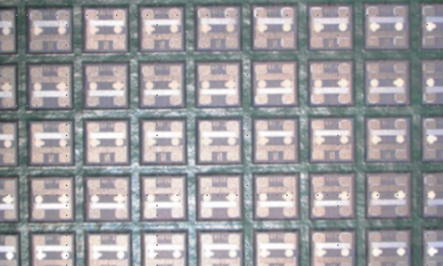
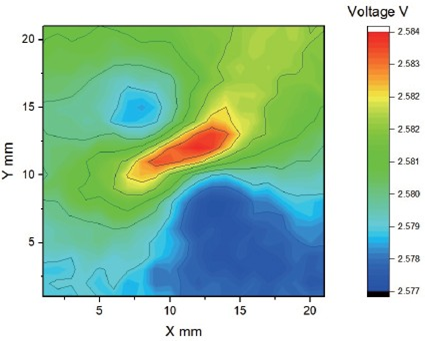
図1には、本分野で開発した超高感度磁気センサGIGS(nano-Granular In Gap magnetic Sensor)を用いた高密度二次元磁気センサアレイモジュールの外観写真を示します。本モジュールは、リチウムイオン2次電池の漏洩電流検査を目的として開発中のもので、300chのGIGS素子を2mmピッチで約70mm×50mmのエリアに実装(図2参照)し、基板裏面には全チャンネルに対応する専用同期検波ICを搭載しており、図3に示すように、1mAの微弱な電流を流したときの磁場分布をリアルタイムで可視化することができます。将来的には、リチウムイオン2次電池の微小金属異物の混入やデンドライト成長による極微弱な短絡電流の発生と、その位置を短時間で検出することを目標としています。
微小金属異物の高感度検出技術の研究開発
食料品等の中に含まれる有害な微小金属異物を検出して排除することは、安全・安心な日常生活を支える上で極めて重要です。本研究は、非金属材料中に含まれる微小な金属異物を磁気センサを用いて高感度で検出する技術の確立を目指しております。具体的には、数百MHz帯の磁気共鳴現象を利用して、材料中の100μm以下の微小金属の検出を検討しております。

磁気マーカを用いた三次元位置計測システムの開発
医療分野や福祉・リハビリ分野において、生体動作の計測を可能とするデバイスやシステムのニーズが高まっており、この要求に対しマーカを生体に取付け、そのマーカが存在する三次元位置を計測し、その位置情報を外部に出力するモーションキャプチャ技術が必要になります。
モーションキャプチャ技術には光学式、磁気式などがありますが、本分野では光学式位置計測システムが使えない閉鎖された空間や被測定体が隠された環境下でも安定して使用可能な新たな磁気式三次元位置計測システムの実現に関する研究を進めています。
具体的には、既に下記の開発を行いました。
- 複数個の高分解能磁気センサ処理回路
- FPGAを用いた高速微小信号低雑音処理回路および計測データの無線伝送機能を内蔵した位置計測システム本体(300×300×30mm)
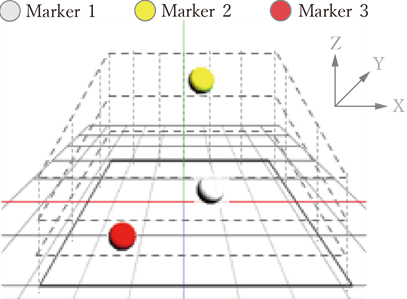
- 磁気マーカの位置を高速度で高精度計算を行うアルゴリズム開発とその可視化
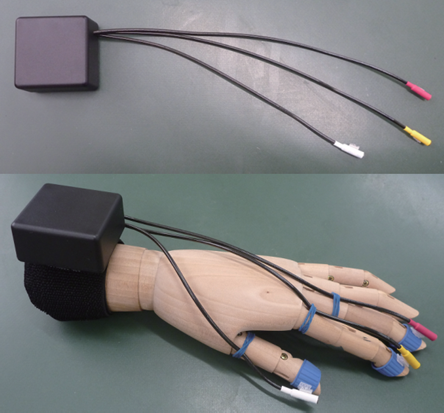
- ケーブルレス小型磁気マーカ(Φ4×15mm)とその複数化および励磁処理回路
図4は、本分野で開発した位置計測システム本体部に内蔵されている回路基板を示したものです。図5は、親指、人差し指、中指に装着した磁気マーカとマーカ用励磁処理回路ユニットを示したものです。図6は、PC上で磁気マーカの位置を3D可視化した例を示したものです。
本システムでは、マーカ部は、位置計測システム本体部と独立しており、3個のマーカを位置計測システム本体の上部空間で同時に動かしても、毎秒10回~20回の速度で高感度な位置検出が可能です。
今後、更なる性能向上を図り、新たな他分野への応用展開も目指す予定です。
光デバイス分野の研究開発
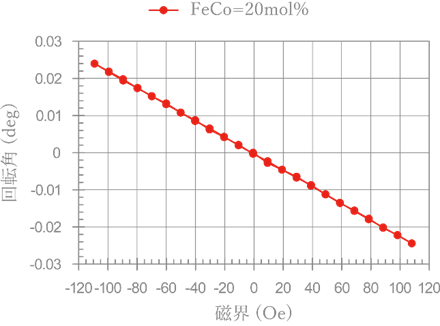
(薄膜組成はFe11Co9Mg29F51、膜厚は0.67μm)
磁気光学応用デバイスの開発
産業機器などでは、モーターの回転制御やインバータの出力制御を行うために、多種の磁界センサが使用されています。その中で光技術を利用した光磁界センサは、小型軽量で、耐電磁雑音性能が高く、絶縁性に優れるなどの利点を有しています。
本分野では、本法人で現在研究開発が進められつつある各種のナノグラニュラー薄膜が持つ優れた磁気光学効果(新機能材料創生部門電気磁気材料分野のページで説明されています。)に着目し、これら薄膜を有効に利用した光磁界センサについて検討を進めております。
プローブ型光磁界センサ
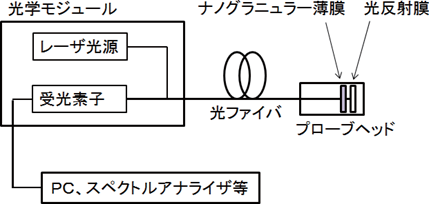
産業機器や装置内部の電気配線近傍など、狭い場所や空間における磁界の検出を行うことを想定した場合、光ファイバの先端部に磁界センサ素子を装着し、ファイバデバイス化したプローブ型の磁界センサは、小型、軽量で、可搬性に優れていることから極めて有効な測定手段になりうると考えられます。本分野では、図7に示す様に、ナノグラニュラー薄膜と光反射膜から構成されるセンサ素子を光ファイバと組み合わせた新たなプローブ型光磁界センサの実現を目指しています。
超常磁性の利用
ナノグラニュラー薄膜は、磁性合金の粒径を10nm程度より小さくすると室温で超常磁性となり、磁化特性にヒステリシスが無くなります。その結果、図8に示す様に、磁界に対してファラデー回転角が直線的に変化します。この特性を磁界センサとして利用することにより、直線性に優れ、ヒステリシスの無い磁界センサを実現することができます。
本開発では、これらの特長を活かし、局所領域の磁界計測が可能な、小型でポータブルな光磁界センサの開発を目指しています。
生体情報デバイス分野の研究開発


装着型運動情報計測システムの研究開発
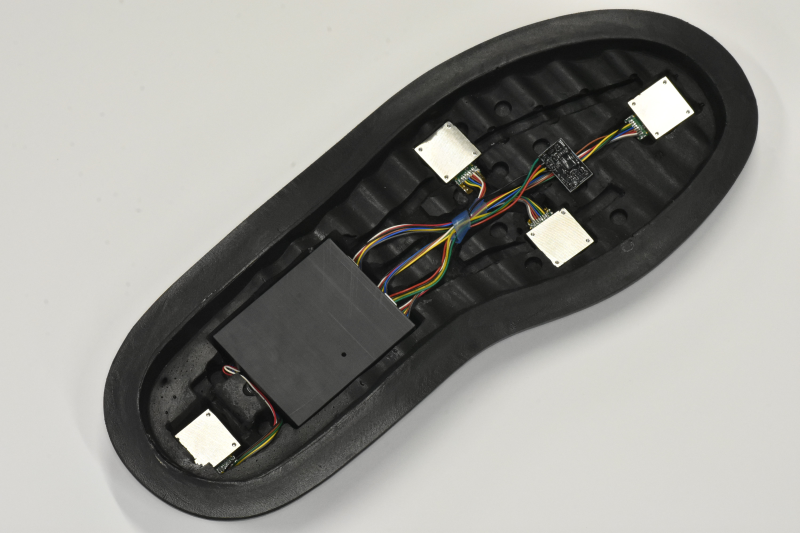
本分野では、本法人で開発した高感度Cr-Nひずみセンサ薄膜の応用として、小型3軸力センサ(荷重ベクトルセンサ)を開発しました(図10・図14)。一般に、耐荷重を一定としてセンサを小型化する場合には、剛性の高い素材を使用する必要があることから荷重印加に伴うひずみ量が小さくなってしまい、従来のひずみゲージでは検出が困難でしたが、ひずみ感度が高いCr-Nひずみセンサ薄膜を用いることにより、検出が可能となりました。
本分野では、この小型荷重ベクトルセンサの医療・健康・福祉分野への応用として、複数の荷重ベクトルセンサを靴底に取り付け、歩行時に足裏にかかる力の向きと大きさを計測する靴センサシステムを開発しました。このシステムは、使用場所や歩数に制限がなく、また荷重ベクトルセンサおよび信号処理回路をアウトソールに内蔵することにより、外観上普通の靴と殆ど変わりなく、履き心地においても違和感のない靴センサシステムとなりました。例えば、様々な運動の際に、足のどの部分にどれだけの力が加わっているかが分かり、スポーツ分野などへの応用が期待されます。
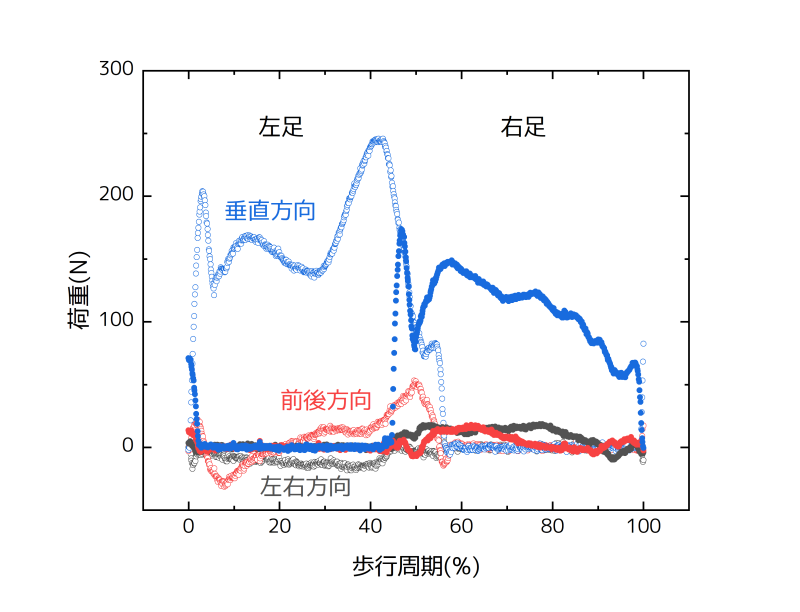
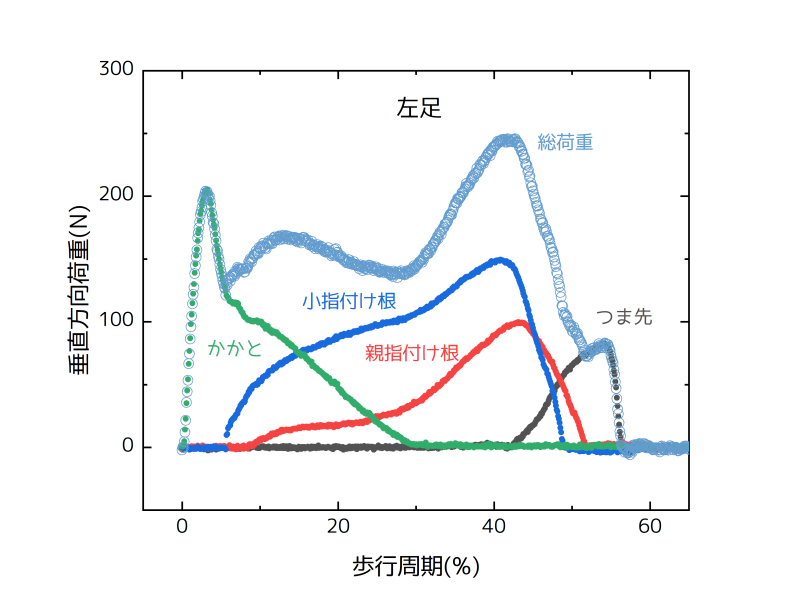
荷重ベクトルセンサは、図10に示すアウトソールに、Cr-Nひずみセンサで構成した4個の荷重ベクトルセンサを内蔵し、x、y、z方向の力を計測します。運動靴の親指、親指付け根、小指付け根およびかかと部に荷重ベクトルセンサを取り付けて(図10・図11)、歩行したときの測定結果の一例を図12・図13に示します。図12に示す左右方向では、足がついた瞬間は外側(図の上)方向、その後は内側(図の下)方向に力の向きが変化しています。前後方向では、かかとがついたときに後ろ向きの制動、つま先でけり出すときに前向きの推進となっていることなどがわかります。図13に示すように部位ごとの荷重情報を詳しく知ることができます。このような測定により、人の歩き方のクセや、病気やけがの回復の状態を知ることができます。